集体城市摄影
今天,我们不断地在社交媒体平台上记录我们的城市体验,塑造一个虚拟的城市形象。《复制城市》(Multiplicity)这个作品为我们揭示了这种关注和兴趣的摄影风景新观点。在成千上万摄影师的镜头下,巴黎呈现出什么样的面貌?哪些是吸引人的热点,哪些是被忽略的角落?哪些是最常出现的姿势和镜头?发布的照片如何反应你对城市的个人看法?
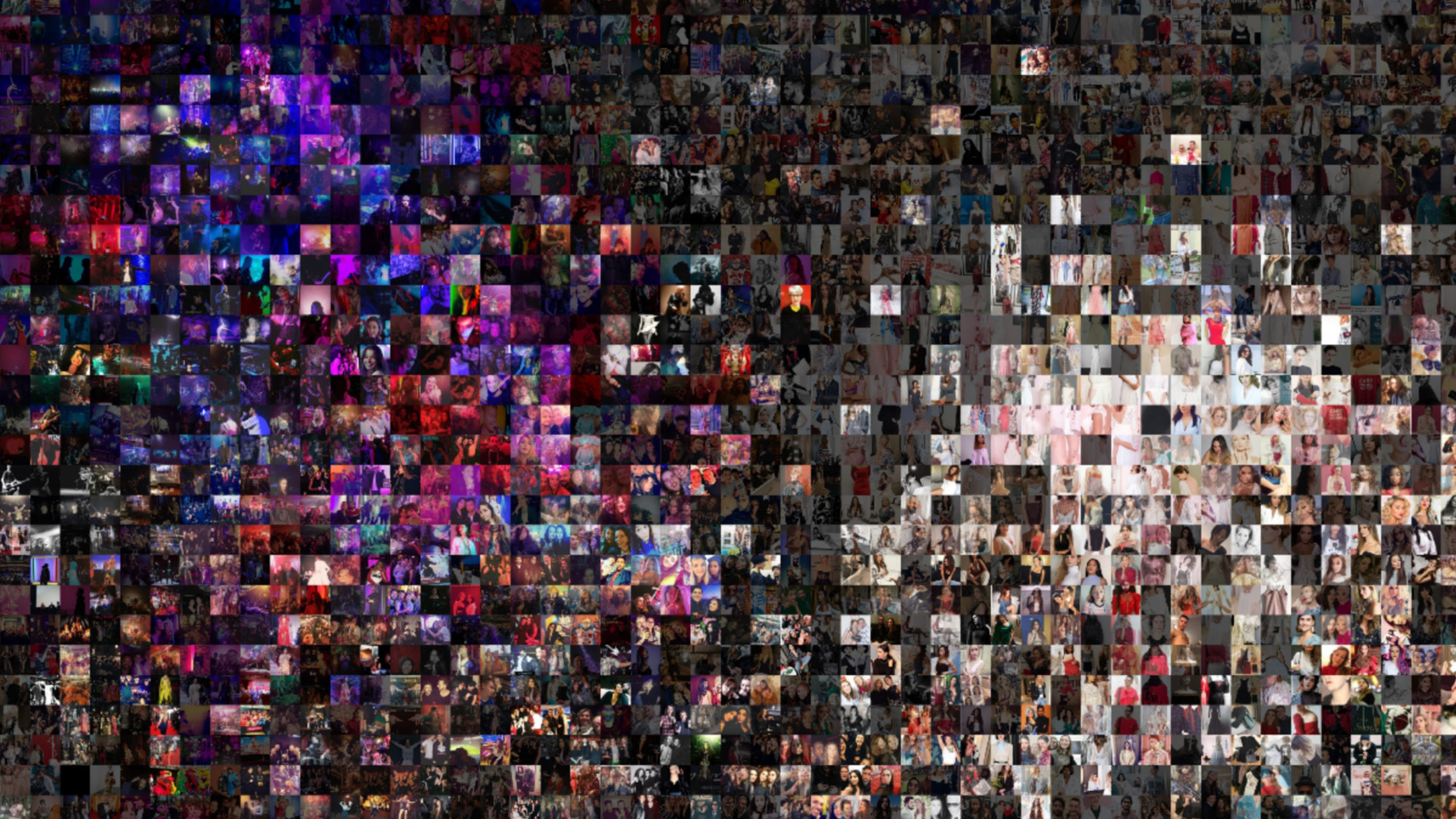
这个互动装置提供一个由成千上万张巴黎市区照片组成的沉浸式影像空间。使用机器学习技术,依照影像的相似性和影像内容编排,是让人们得以从视觉探索影像风格和内容的微型领域。
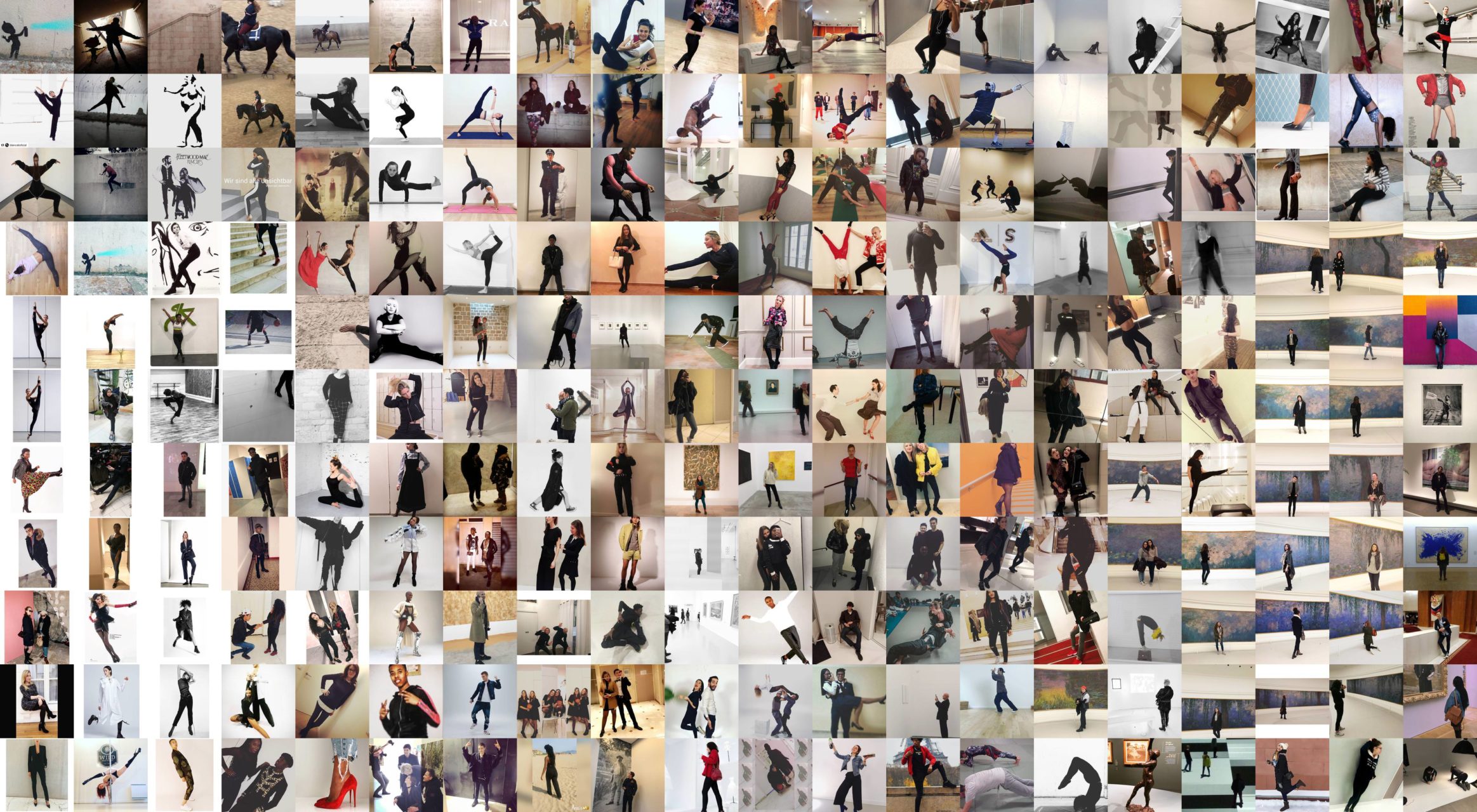
特别强调的是围绕在特定地点,极其相似的密集影像:经典姿态的集体重现,相同,但又不同。对我来说,这些几近相同的密集影像成了最有趣的一面。人们多久拍一次同样的照片?同时,每张照片都有一点不同,仪式性不断的重演和重新发掘照片的想法也有令人欣慰的魅力。
安置与互动
这个投影横跨三个解析度1080p的正方形高清影像,以稍微倾斜的三联画结构排列,让参观者身临沉浸式的影像空间。
参观者可以使用像摇杆这样的触控式设备来操控浏览地图。互动的註释有助于识别主要地图区域。应用程式进入休眠状态与巴黎的梦境。
投影显示从云端全景图、云层格式到全网格,影像可以放大缩小。这种分层方式可以让我们放大后更容易理解集体和旁边(相邻的)结构,同时在放大后提供高画质的影像。

内容选择和数据处理
根据2017年取样自620万张地理位置标示在巴黎发布的社交媒体照片,自订选择二万五千张照片作为地图的基础。
它包含:
‧ 一部分最被喜爱的照片
‧ 一部分统一空间样本
‧ 一部分人工选择的群聚照片
‧两部分来自最热门景点的最新照片
这些照片被一个设计成图像分类(从TensorFlow开源软件库和Keras开源神经网路库)的神经网路分析。我用通常使用于分类的特征向量来计算图像之间的配对相似度。地图布置是採用t-SNE计算的——一种使相似影像接近的最佳化二维布置的演算。

布局策略
连接云层全景图和网格细节图是一个很有趣的挑战。经过几次失败后,下面是我找到的方法:
一、最初放大视图根据t-SNE演算法的座标来展示影像。我们绘制一些离当地群聚中心的图像(技术上讲:在K-近邻演算法中有最高度的向心性),大一点以强调群聚结构。最后,影像再用后制处理:Photoshop的智能模糊滤镜和微调,让影像提供较佳的对比效果和方便缩放的功能。
二、网格视图将每个影像放在栅格化座标系统上,并尽可能靠近他们的原始座标。这些布置中,部分影像将被隐藏在其他影像之后;我们同样的将那些比较靠近当地群聚中心的影像放在上方。为了避免放大以及平移时的闪烁,这些影像略微模糊。
三、最后,完整的网格视图将所有之前隐藏的图像分配到下一个最好的空闲,从而形成一个几乎完全填满的网格。
四、在角落处,由于云的圆形特质,有些影像遗失了,所以我们用更大的影像库次优图像匹配(即和邻近最相似影像)填满这些影像。总而言之,这个方式确保不同转变之间最小的像素改变,从而带来持续且令人满意的变焦体验。

无数据的视觉化
最后补充一句——我的目的不是为了测量城市,而是用社交媒体内容为材料来绘制城市的肖像。与其说是统计的方法,不如说这个作品呈现一个质量内容的促进统整,是开放性的探索和解读,雖然有意识地进行策划和预置,但沒有预先的阐释。
同时,数据有助于以人类可消化的方式整理这些内容。否则人们如何将成千上万的图像扫描并组合成连贯的整体?
因此可以说,数据被当作体验和设计过程的媒介,但既不是视觉化的目标,也不是视觉化的终点。
在自动分析、结果检查——机器的建议和结论是什么——和我自己的操作——(在布局、内容选择、设置……)之间的互相作用是振奋人心的探索。
像是一个设计隐喻,使用手写为文字註记,暗示我作为一位积极作者和主观意识形成的过程。
最终的结果来自于我与城市、影像内容和演算法之间的对话,实际上在整个作品中都带给我惊喜和启发。
《复制城市》是莫里兹‧斯特凡纳对数位城市影像进行系列研究的一部分:
Stadtbilder超越实际硬体设备研究都市的数位层次。
Selfiecity仔细研究自拍现象,旨在辨识不同都市的自拍风格。
On Broadway从一条街道开始,将各种定量和定性的信息交叠。法国电力公司基金会在 “123数据”展览的委託项目。
译自本刊英文版原文《Multiplicity : A collective photographic city portrait》
一位处于数据可视化、信息美学与用户介面设计交叉点的“真相与美丽运作者”,莫里兹・斯特凡纳有认知科学与介面设计的背景,他的工作是抽象和复杂现象的图像分析与美学。
一位处于数据可视化、信息美学与用户介面设计交叉点的“真相与美丽运作者”,莫里兹・斯特凡纳有认知科学与介面设计的背景,他的工作是抽象和复杂现象的图像分析与美学。
